Today there are a few options for collecting underground 3D mapping data in tunnels, sewers, and culverts. This data can be used for condition assessment, for planning design and rehabilitation solutions, or to assist with construction at or near this subterranean infrastructure. The costs involved vary across these methods, each having their own advantages and disadvantages. In this article 3 different approaches, and the factors that affect their costs, are briefly highlighted.
Traditional 3D Mapping / Laser Scanning
The traditional person entry approach (3D mapping or laser scanning) is by far the most utilised and involves experienced surveyors or operatives walking through the underground structure. Hence it is typically limited to larger diameter tunnels, around 1,200 mm or greater. Whilst within the structure, they carefully place calibration targets and stationary laser scanners (or survey grade LiDAR), usually using equipment and software from companies such as Faro, Leica, and Trimble, to name a few mainstream companies.
If performed correctly, this method provides highly accurate 3D mapping data that can deliver results with relative and absolute accuracies within millimetres across the entire structure (depending on the distance surveyed and the ability to close the loop). Surveyors may capture data every 5 meters if they require high density 3D point clouds (for a high level of detail), or every 20 to 50 meters for lower density data. This very much depends on the application, budget, and requirements of the survey.

Due to the substantial amount of time that is required to plan, collect, and then post-process this data, combined with the high levels of health and safety risks involved, this is the most expensive way to collect underground 3D mapping data. However, costs can still vary greatly depending on the levels of accuracies required, the level of detail (density of the 3D point cloud), the confined spaces entry risks involved (number of entry points, depth, presence of hazards etc.), the level of service provided by the surveyor or contractor, and the reporting or deliverables provided. From our research, capturing and delivering this underground 3D mapping data in linear underground infrastructure typically costs £15,000 to £30,000 per kilometre.
Photogrammetry
Photogrammetry has been used extensively above ground but is more recently starting to be utilised to generate 3D maps of underground structures. It often does not involve person entry into the underground infrastructure, and so represents a safer approach than traditional methods. The method involves taking thousands of images of the entire structure from lots of different angles, ensuring adequate lighting is available for each image. Multiple cameras are often used on robots or drones that are remotely operated.
When drones are used to collect this data, the process requires a highly skilled drone pilot, as it can be very challenging to fly a drone in a confined space. As the images are collected the relative position of the drone is also monitored, and then a range of post-processing software packages are used to stich all these images together in 3D space when offsite, producing a 3D map.
The cost of collecting and processing this data incorporates the time required to access the shaft, manhole, or other entry point to the asset, the time needed by the drone pilot to fly the drone onsite, the time needed by the surveyors to capture georeferenced data at the entry points, and the time and data processing costs for post-processing the data to create the 3D map. Hence, like with traditional surveying, it does correlate with the distance that needs to be mapped.

On short sections of up to 150 to 200 meters this can usually be collected within half a day or so (this includes several 15 – 30-minute flights with a drone to ensure sufficient data is collected and to a high quality). However, for longer sections of around 1 km or more, it can take several days depending on the access requirements, and the number of flights required to ensure necessary coverage. Post-processing can then also take several days or weeks depending on the amount of data and quality checks that are required.
It is not always possible to survey some assets via photogrammetry-based drones, due to limited battery life and the risk of losing the drone in the asset. However, for shorter sections this method can be a safe and suitable way to generate 3D mapping data. For longer sections, robotic crawlers, floating platforms, or boats, equipped with cameras and lighting rigs, are more suitable, if the lighting and cameras provide adequate coverage of the structure.
Whilst photogrammetry can produce a visually impressive model, with photographic rendering allowing you to visualise fine cracks and other defects from the images, it is sometimes described as 2.5D, as it is a construction of 2D images that together create a 3D environment. For this reason, the resolution at each 3D point can be 10 to 30 mm, unless an impractical number of images are taken in the structure. This is not always an issue, but worth noting as a comparison to laser-based techniques, which can provide resolution down to 1 mm. Typical costs for underground 3D mapping data generated by photogrammetry ranges from £8,000 – £15,000 per kilometre and highly depends on the access requirements and distances surveyed.
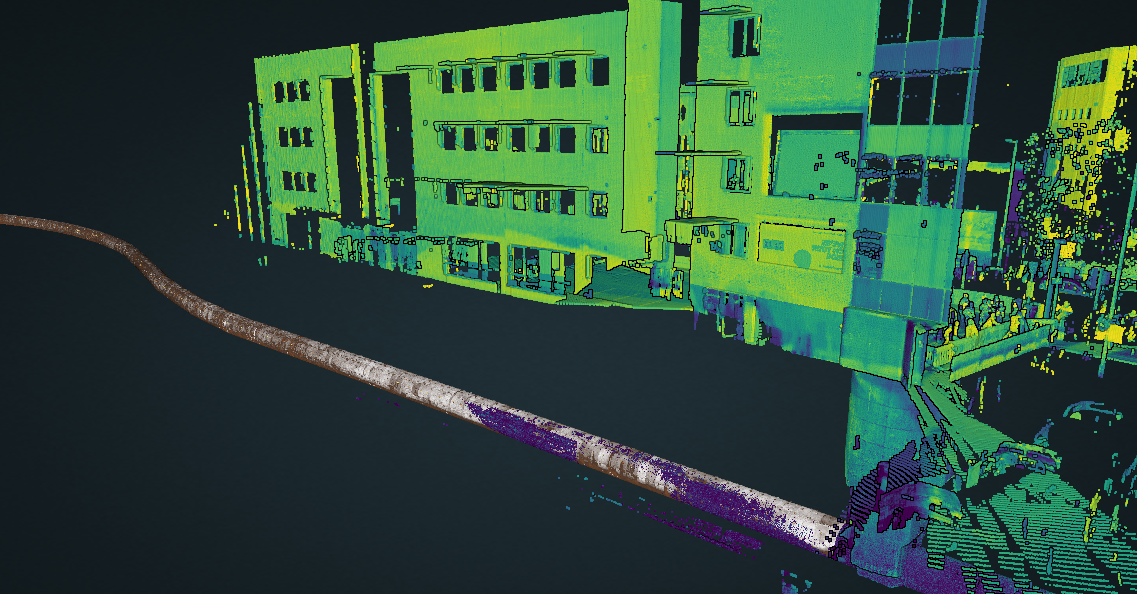
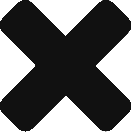
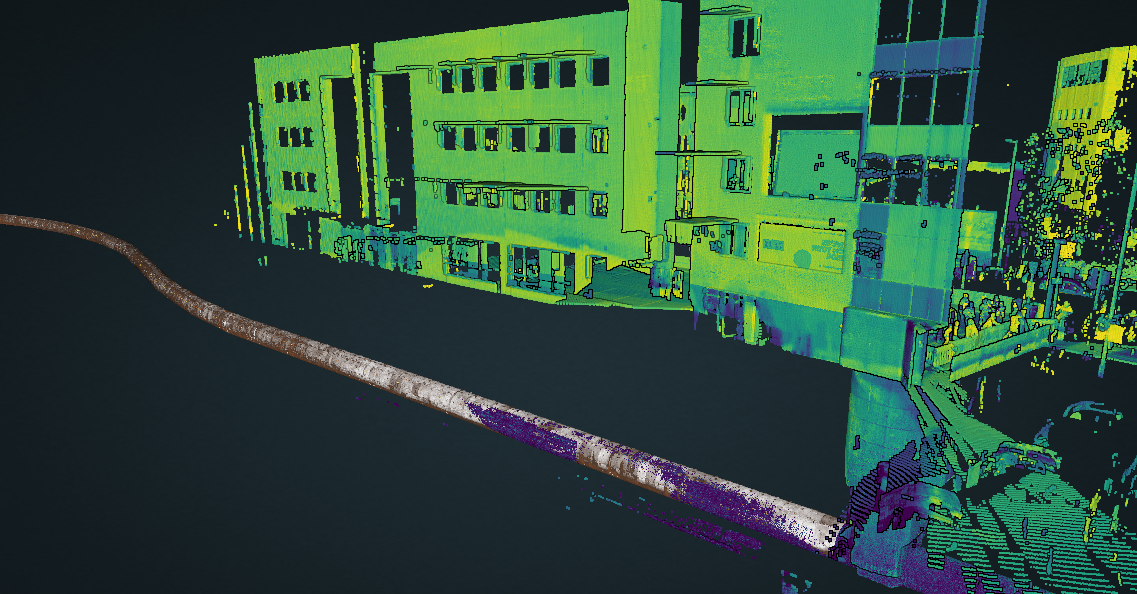
Mobile LiDAR
Another new method to emerge in recent years utilises mobile LiDAR (light detection and ranging) scanners and IMUs (inertial measurement units). This technology is used in many autonomous vehicles, including drones and robots in a range of infrastructure environments. Underground assets pose additional challenges to using mobile LiDAR scanners, however like photogrammetry methods, when placed on robots, drones, or floating platforms, they provide a safer way to collect 3D mapping data compared with traditional approaches. The costs are also influenced by the access requirements and the survey distance.
In general LiDAR scanners are significantly more expensive than cameras used in photogrammetry, and accurately processing the data from them requires specialist software. As highlighted previously, the accuracy of the 3D mapping data is typically greater than photogrammetry, due to the nature of how LiDAR works. However, as with traditional 3D mapping, the accuracy highly depends on strict protocols being followed when the data is collected and processed. For these reasons the costs are generally higher than photogrammetric methods, but the results can be used to determine accurate distance measurements and finer resolution, ideal for measuring levels of wall or ceiling corrosion and other fine details in 3D space.
Mobile LiDAR is typically placed on robotic crawlers, floating platforms, or boats, and in some cases (where space permits in a confined space) they can be used on drones (still early days for these but there are some promising emerging solutions). Hence, they can cover multiple kilometres in a single day with the right deployment, minimising time onsite and therefore costs for longer surveys. There are a few companies around the world offering underground mobile LiDAR solutions for 3D mapping, and the costs to capture and deliver this data typically ranges from £10,000 – £16,000 per kilometre.
What underground 3D mapping solution should I use in my project?
There are a wide range of advantages and disadvantages of each of the solutions detailed here, and different costs involved. To summarise, the following factors heavily influence all solutions:
— Access requirements (e.g. confined spaces, multiple access points etc.)
— Distance to be surveyed (economies of scale as survey distance is increased)
— Person entry vs non-person entry (e.g. robot, drone, or floating platform)
— Processing and reporting time
— Accuracies, quality and extent of the deliverables (e.g. 3D point cloud, DWG files, condition report etc.)
If you’re looking to obtain highly accurate data across the entire asset (within 20 – 50 mm absolute accuracy) then you should use traditional surveying methods. If the absolute accuracy of the point cloud is less important but a photographic render of your asset is required then photogrammetry is a good choice. Smaller surveys (<150 meters) where drones can be deployed also lend themselves to photogrammetry due to the lower power requirements compared with mobile LiDAR.
However, for surveys >200 meters in distance, where an absolute location accuracy <0.5 meters is sufficient then mobile LiDAR solutions are likely best. They are also ideal for accurately quantifying deformation and corrosion with millimetre resolution and can be combined with imagery for condition assessment.
In some surveys, where person entry is prohibitively expensive or unsafe, then you may want a combination of photogrammetry and mobile LiDAR to get the best of both methods.
Going forward, photogrammetry and mobile LiDAR are continuing to advance rapidly and will likely become the dominant methods for collecting underground 3D data within the next 3 to 5 years. They are also enabling 3D mapping of previously inaccessible underground infrastructure, meaning we can now collect 3D data underground that was impossible to collect just a few years ago.
As more organisations start to adopt these new technologies at scale, the associated costs will decrease. We can then all start to reap the benefits of a fully digitised underground environment. This will also enable new digital services to emerge, that can ultimately help to build and maintain this critical infrastructure.